
Kunstmatige Intelligentie is een nieuwe tool in de gereedschapskist van een robotica engineer; een nieuw type hamer. Echter, te vaak wordt deze tool ingezet als gereedschap voor ieder probleem. Een onderzoeksteam van de TU Eindhoven zet daar vraagtekens bij; niet ieder probleem laat zich immers vertalen naar de vorm van een spijker. Het Lazy Robotics idee kiest een heel andere invalshoek om tot een autonome robot te komen die heel goed kan opereren in de High Mix Low Volume omgeving van de Brainportregio.
“We focussen op autonome robots die traceerbare beslissingen nemen en niet méér doen dan wat strikt noodzakelijk is voor de taak. Dit gedachtengoed noemen we Lazy Robotics”, zegt zegt Jordy Senden, onderzoeker binnen de Robotics Research groep (RBT) aan de Technische Universiteit Eindhoven (TU/e).
Het team betwijfelt of Large Language Models (LLMs) en Vision Language Action Models (VLAs), tegenwoordig veel toegepast in de video’s die online viraal gaan, de oplossing gaat zijn om robots autonomer en inzetbaar te maken. Tijdens Manufacturing Technology Conference 2026 houdt hij een Tech-talk over deze systeemaanpak en het Lazy Robotics paradigma. Dit werk gebeurt binnen AI-Matters, een Europees programma binnen de Brainportregio gericht op de inzet van Kunstmatige Intelligentie in de maakindustrie.

In een tijd van LLMs en VLAs kiest Eindhovens onderzoeksteam voor een systeemaanpak
Robot heeft geen idee wat hij doet
Deze end-to-end neurale netwerken, met miljoenen parameters, worden getraind op grote hoeveelheden data. Deze data worden vaak gegenereerd door gebruik te maken van simulaties waarbij één specifieke robot één specifieke taak duizenden keren uitvoert, met telkens net iets andere variaties in de gesimuleerde wereld. “Dit resulteert in hele gave filmpjes, maar de robot heeft eigenlijk geen idee wat deze aan het doen is en waarom.”, zegt Senden. Dat laatste is belangrijk, vooral als dingen mis dreigen te gaan.
Brainport DNA: system thinking
Het idee van het Eindhovense robotteam is gebaseerd op ‘system thinking’: split de benodigde functionaliteiten van de robot op in kleine blokken; beschrijf deze afzonderlijk, robot agnostisch; en zorg voor een mechanisme dat deze kan koppelen voor en tijdens de uitvoering. Deze aanpak volgt de principes van Systems Engineering. Jordy Senden: “Zoals ASML denkt: splits functionaliteiten, zodat je het systeem eenvoudiger kunt updaten. Deze benadering vormt een tegenpool tegenover de LMMs en VLAMs die inputs en outputs koppelen via één groot model.” Het grootste bezwaar dat het Eindhovense onderzoeksteam tegen deze grote taalmodellen heeft, is dat ze in feite een black box zijn. Je traint de robot en het visionsysteem met heel veel data in de hoop dat het werkt. In veel gevallen werkt het inderdaad. Je kunt echter niet verklaren waarom het in bepaalde omstandigheden niet werkt; dan rest niets anders dan opnieuw trainen met nog meer data. Ook als je een specifieke robot getraind hebt voor een specifieke taak en je verandert de configuratie, moet je weer opnieuw gaan trainen. Daarnaast zorgt deze aanpak voor een te sterke koppeling tussen de taak en het systeem, als je een ander type camera installeert, moet je eerst weer gaan trainen.
Kennis uit wereldmodellen halen
Een belangrijk blok is het Wereld Model (WM) waarin alle kennis die de robot van de wereld heeft, wordt opgeslagen. Deze aanpak gebruikt Tech United, het robotvoetbalteam van de TU/e, al bijna twintig jaar. “Hun volledig autonome robots zijn niet voor niks al 8 keer wereldkampioen in de Mid-Sized League”, merkt Jordy Senden op. Data zijn belangrijk, maar het gaat om de informatie die je eruit haalt. Door data naar een semantisch hoger niveau te tillen, denken de Eindhovense onderzoekers dat je de hoeveelheid data die nodig is, kunt reduceren.” In zo’n groot taalmodel zit de kennis impliciet opgesloten, maar je kunt deze niet expliciet maken. De Lazy Robotics gedachte wil dat de kennis van de wereld als expliciete modellen worden meegegeven aan de robot, zodat deze kan redeneren over de huidige situatie. Zo’n zogenaamd wereldmodel is feitelijk een digitale beschrijving van de werkelijkheid, bijvoorbeeld een niet verplaatsbaar object in de ruimte; of een mens in de ruimte. “Door hier semantiek aan toe te voegen, kan de robot redeneren wat hij moet doen”, legt Senden uit. Zo denkt men een robuust autonoom robotsysteem te bouwen dat tijdens de uitvoering traceerbare beslissingen kan nemen en het gedrag kan aanpassen. De variatie in de wereld is namelijk groot; dat kun je aan de voorkant niet allemaal afvangen in de designperiode van de autonome robot.
De robot, de taak en de skills
Het Lazy Robotics team knipt de zaak op in drie blokken: een beschrijving van de robot, de taak die deze moet uitvoeren, en de skills die hiervoor nodig zijn. Bij het trainen van deze drie componenten kan wel degelijk AI gebruikt worden, maar in een veel kleinere omvang dan anderen doen. Door de beschrijving van de taken, skills, en robot te ontkoppelen, kunnen deze tijdens de uitvoering flexibel gekoppeld worden. Dit moet ertoe leiden dat de robot meerdere taken kan uitvoeren, precies wat de High Mix Low Volume productieomgeving in de Brainportregio vraagt. Doordat de skills los staan van de robot, is men robot onafhankelijk. “We zouden dan ook één taak door meerdere robots kunnen laten doen”, zegt Jordy Senden. De robot wordt autonomer, gaat zelf scenario’s plannen en afwegingen maken op basis van hypothesen hoe bepaalde taken het beste uitgevoerd kunnen worden. Dat kan de ene keer snel zijn, de andere keer langzamer omdat de gevraagde kwaliteit op een hoog niveau ligt. Op basis van de kennis die de robot in zijn wereldmodel kan raadplegen, kan deze een voorspelling doen van zijn acties. De robot kan nu de data die bijvoorbeeld het visionsysteem genereert vergelijken met deze voorkennis en dan beslissen bepaalde acties te doen of niet.
Het gaat immers in de reële wereld niet alleen om snelheid, maar bijvoorbeeld ook om hoeveel energie een handeling kost, hoeveel resources, om de veiligheid
Fabrieken en tomaten
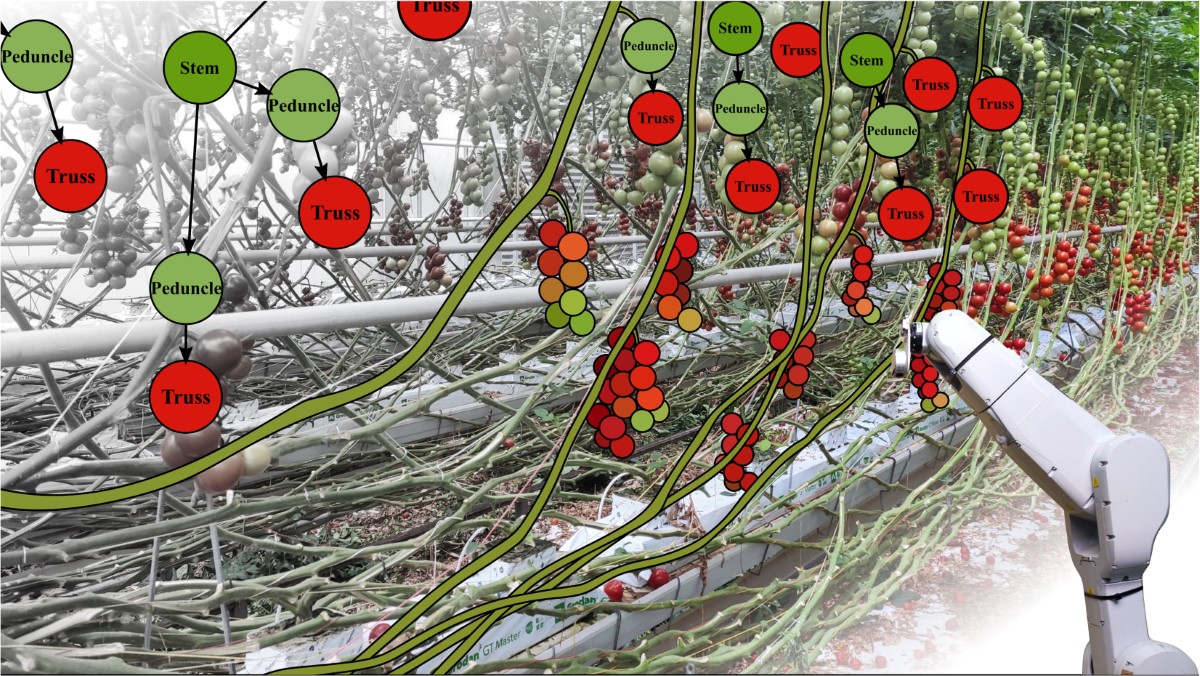
Fabrieken zijn vrijwel nooit identiek, vooral niet als je alles exact geometrisch gaat opmeten. Toch hebben ze op een bepaald abstractieniveau veel overeenkomsten. Door deze in het wereldmodel te stoppen, bouw je aan een flexibel systeem. Het onderzoeksteam heeft het gebruik van een wereldmodel getest met tomatenplanten. Elke plant is anders als je deze exact gaan opmeten, maar op topologisch niveau zijn planten redelijk gelijk; er is een hoofdstam waaraan trossen en bladeren in een voorspelbaar patroon groeien. Als je de stam vastpakt en daarlangs omhooggaat, kom je ofwel een blad tegen of een tros tomaten. Lazy Robotics zoekt naar wereldmodellen die gebruik maakt van dit soort invariante beschrijvingen. Als de skills die de robot nodig heeft om de tros tomaten te knippen gebaseerd is op deze invariante beschrijving, wordt deze onafhankelijk van de exacte geometrische presentatie. Jordy Senden: “We geven de robot een ruwe voorspelling mee van waar hij de tros tomaten mag verwachten. De robot heeft nu voorkennis uit het wereldmodel en koppelt dit aan de info van bijvoorbeeld de camera. We houden rekening met meerdere hypotheses; de informatie klopt met het model, het klopt niet, of we weten het nog niet. Deze expliciete hypotheses stelt de robot in staat om extra informatie te verzamelen, voordat deze een conclusie trekt.”
Minder tijd kwijt aan de use case
Jordy Senden hoort vaker de kritiek dat de aanpak van Lazy Robotics diepgaand en complex is. “Wij denken dat we zo diep moeten gaan om op een hoger niveau gemakkelijker te kunnen werken. Als een dergelijke ontkoppeling eenmaal bestaat, zijn we minder tijd kwijt aan het maken van een specifieke oplossing.” En dat is wat de maakindustrie in de regio zoekt. Hij ziet nog een ander pluspunt van deze multi skill approach: het hele systeem wordt terugwaarts traceerbaar. “De robot kan uitleggen waarom hij bepaalde skills gebruikt, je krijgt hierdoor meer invloed op wat de robot doet.” Het gaat immers in de reële wereld niet alleen om snelheid, maar bijvoorbeeld ook om hoeveel energie een handeling kost, hoeveel resources, om de veiligheid. Met de aanpak van Lazy Robotics maakt de robot straks de afwegingen zelf en kan deze uitleggen waarom hij tot een bepaalde keuze komt. Volledig traceerbaar, niet op basis van een black box.
Jordy Senden houdt op 23 april tijdens Manufacturing Technology Conference in NH Koningshof in Veldhoven een Tech-Talk over Lazy Robotics. Interesse: aanmelden kan via de website

